Robotics work which i had done right from 1999 to till date..
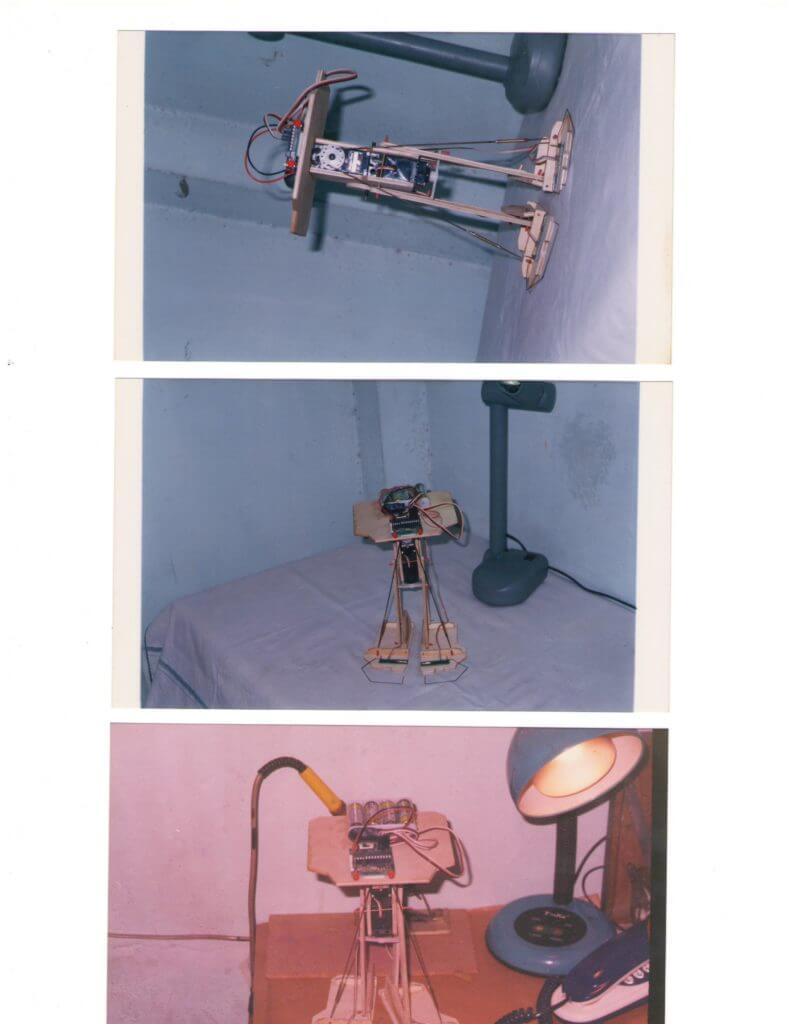
1. Bi-pedal walking robot
2. Stair case climbing robot
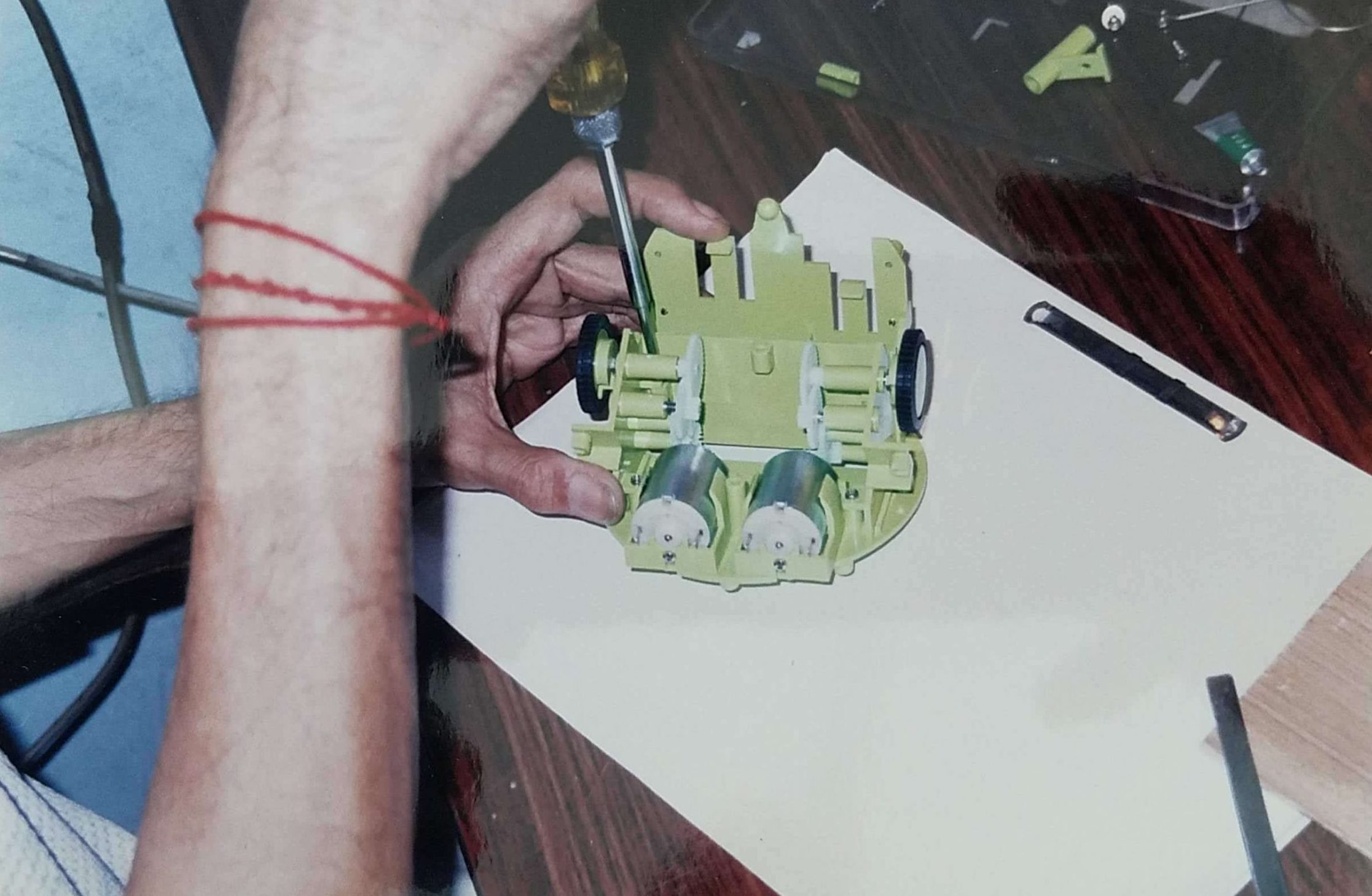
3. Wall climbing robot
4. Edge detection robots
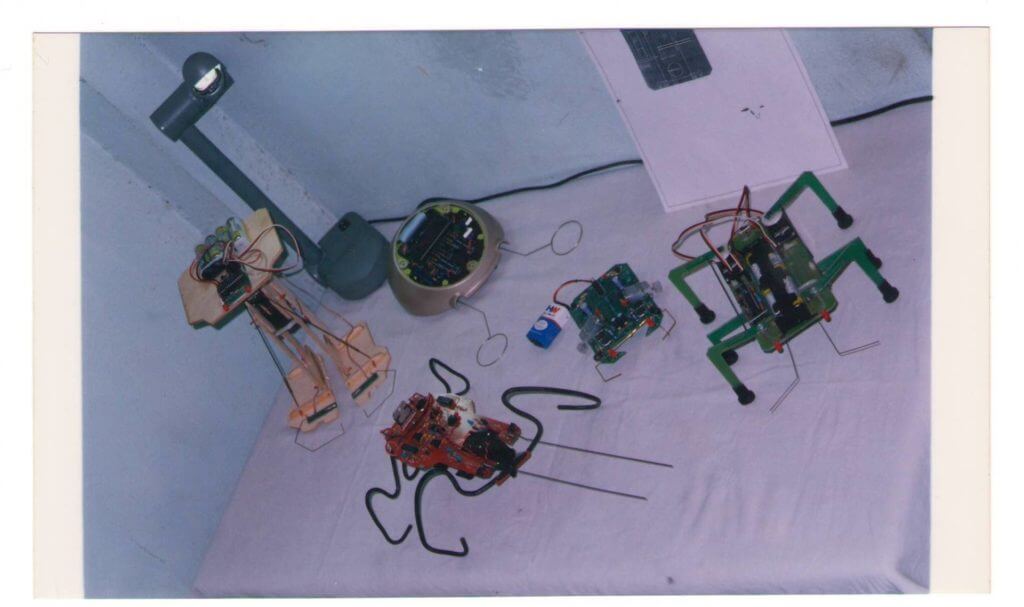
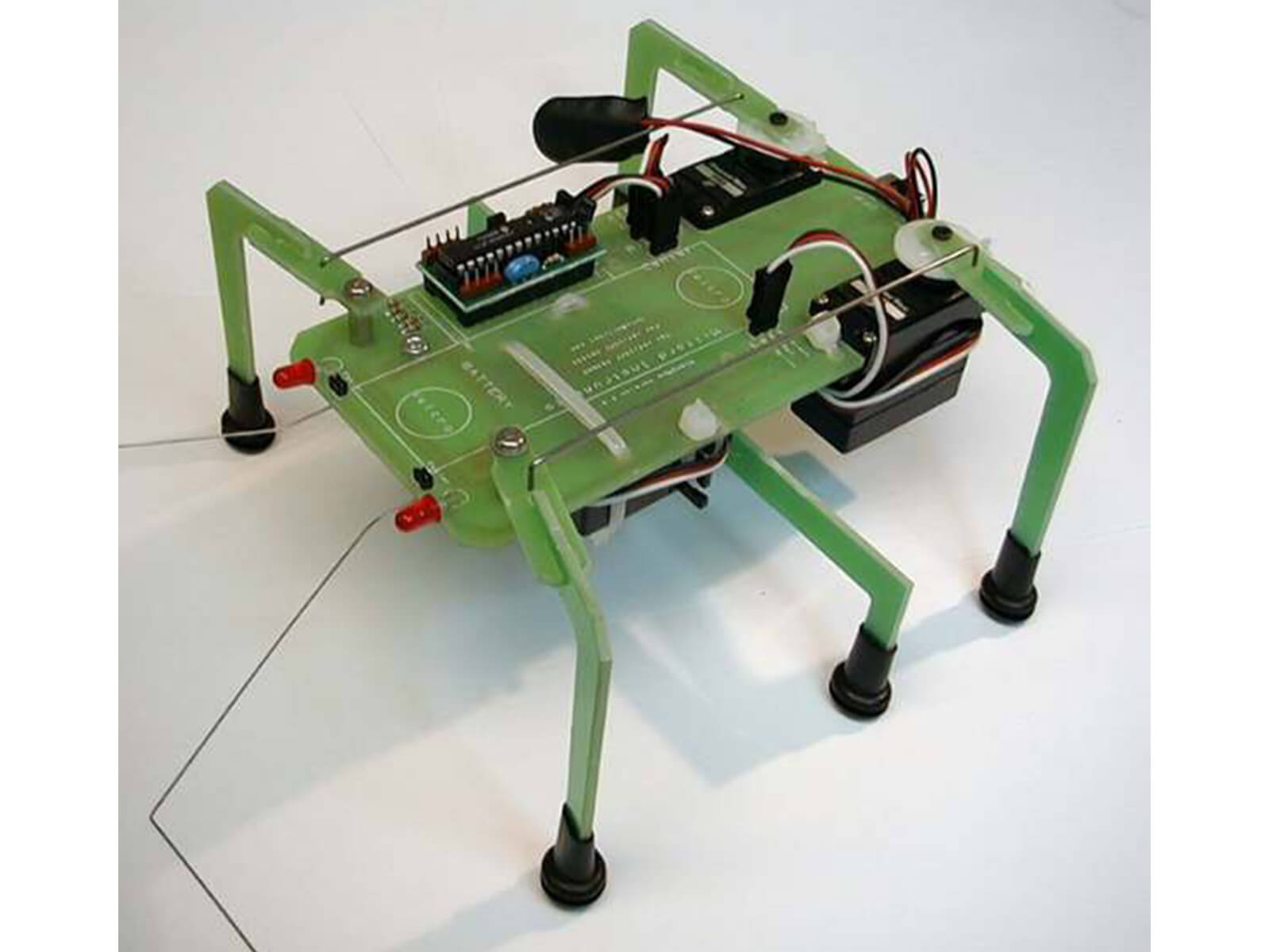
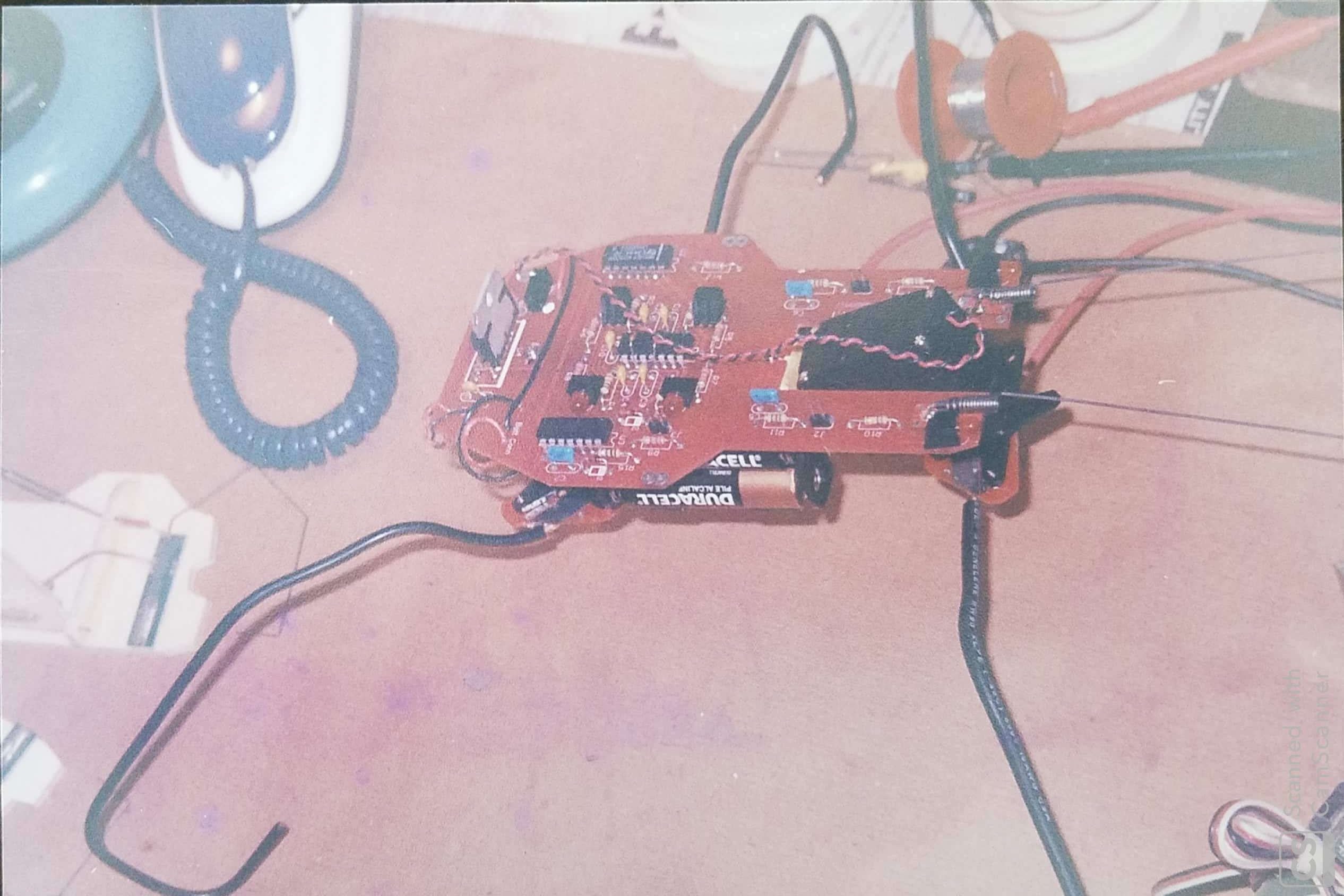
5. Hexapod robots (6 and 8 legs)
6. Artificial life from test bed
7. Neural net robots
8. Light seeking and light avoiding robots
9. Acoustic modem for the deep underwater surveillance robot
10. Un-manned air craft vehicle
11. Micro air vehicle
12. Nano air vehicle
13. Invisible laser snooper
14. Ultrasonic radar
15. Sensortronic cluster for the robotic maneuverability system designed using ADSP533 black fin
16. RFID based robotic guidance system
17. Fire fighting robot
18. Hybrid electric driverless vehicle
19. RC servo all terrain vehicle
20. PC controlled robotic tank
21. Mobile phone based / guided autonomous robotic vehicle system
22. Black box for robots
23. Night time vision control system
24. LEGO Mindstroms we have developed lot of prototypes
25. Lego Mindstroms NXT with Java and LejOS developed high end robotic platforms for civilian
purpose
26. Fuzzy logic based adaptive cruise control for fast moving platforms
27. GPS guided vehicle / bi-pedal with pick and place functionality incorporated
28. Indoor GPS for the domestic robots
29. 6-axis robot
30. Bi-Pedal walking robot with solar power harvester
31. Insectoids – 3 servo / 2 servo and 1 servo models
32. Rover with caterpillar belt driven.
Advanced intelligent multitask wall climbing reconfigurable robot
A robot is not a simple affair to build, especially when we try to suspend it off of the ground.
This robot can climb walls through a series of motions, by turning off the suction to a few suction cups, forcing the cylinders to extend, placing the suction cups down and reengaging suction, it can move across vertical surfaces very easily
As a proof of concept, this robotic platform will acquire intelligence via controller , future extensions and applications will be built on top of it .
It can do different maneuvers on all axis the scenarios where it will be allowed to train
1. Plane wall climbing
2. slippery surface via fuzzier inteiilgence support
3. climbing on the pipe via Winchester mechanism
4. Crawling
To achive as a based board we need the following
ARM -11 Development board
Freescale 32-bit development board
Already available suction pads and pumps
Sensors kit will be mentioned upon approval